Title of Research:
Interactive Finite Element Models for use with Haptic Robots
Description of Research:
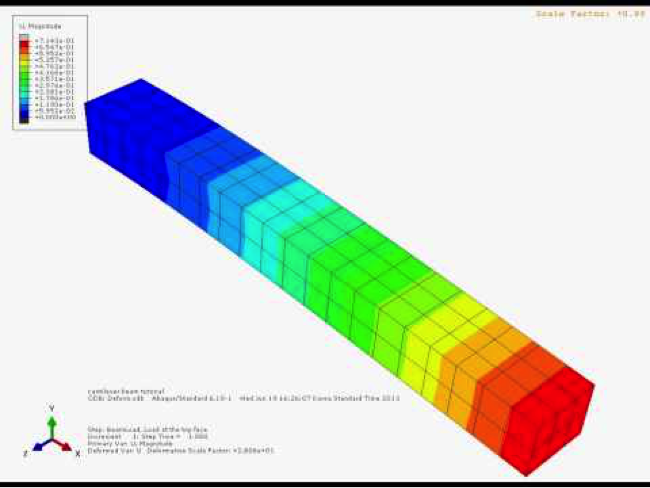
Haptic robots are robots that allow user interaction through physical feedback, e.g. a joystick mouse pen. The use of these robots allows users to feel and understand phenomena in a way previously impossible. To support the hypothesis that the use of haptic robots improves learning comprehension, we are developing an interactive program that models mechanics problems; e.g., bending of a cantilevered beam. These simple mechanics problems are based on finite element models and can be deformed in real-time through the use of the haptic robot.